Hi, I'm Khagesh Bhardwaj
Competent in
Dynamic Robotics Software Engineer and emerging leader, with a zeal for challenging boundaries in Robotics and a rapid, enthusiastic learning approach
About
I'm Khagesh Bhardwaj, a dynamic engineer pursuing a Master's in Mechanical and Aerospace Engineering at UC San Diego, specializing in Robotics & Controls. With over 4 years of experience at the Indian Space Research Organization (ISRO), I bring a unique blend of aerospace engineering expertise and software development skills to the field of robotics.
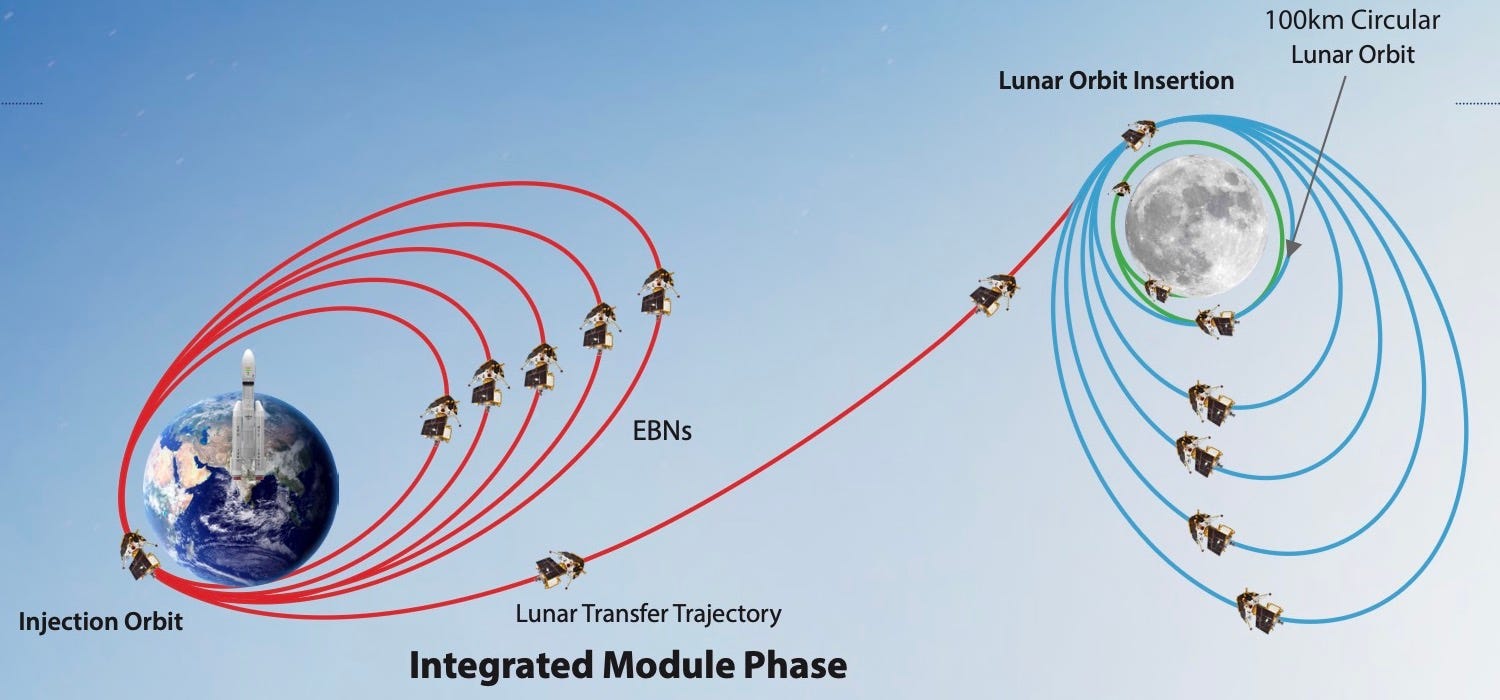
During my time at ISRO, I played a crucial role in spacecraft propulsion, contributing to high-profile missions like Chandrayaan-3 and Gaganyaan. My work ranged from mechanical design and analysis of propulsion components to developing mission-critical software for propulsion system simulations.
Currently at UC San Diego, I'm enhancing my expertise in robotics, control systems, machine learning and computer vision. My project portfolio showcases proficiency in mobile manipulator controllers, computer vision, visual-inertial SLAM, and optimal control strategies for autonomous robots.
With a strong foundation in aerospace engineering and growing expertise in robotics, I'm poised to make significant contributions at the intersection of space technology and autonomous systems.
Experience
- Developing an advanced kalman filter system for robust multi-object tracking, which can outperform traditional bounding-box-only tracking methods in accuracy (eg. HOTA ≥ 76.9 on MOT17 val set).
- Enhance the algorithm by integrating deep neural features, achieving performance better than StrongSORT.
- Tools: Multi-Object Tracking, Probabilistic Data Association, Object Detection, Deep Learning, Computer Vision, Kalman Filtering
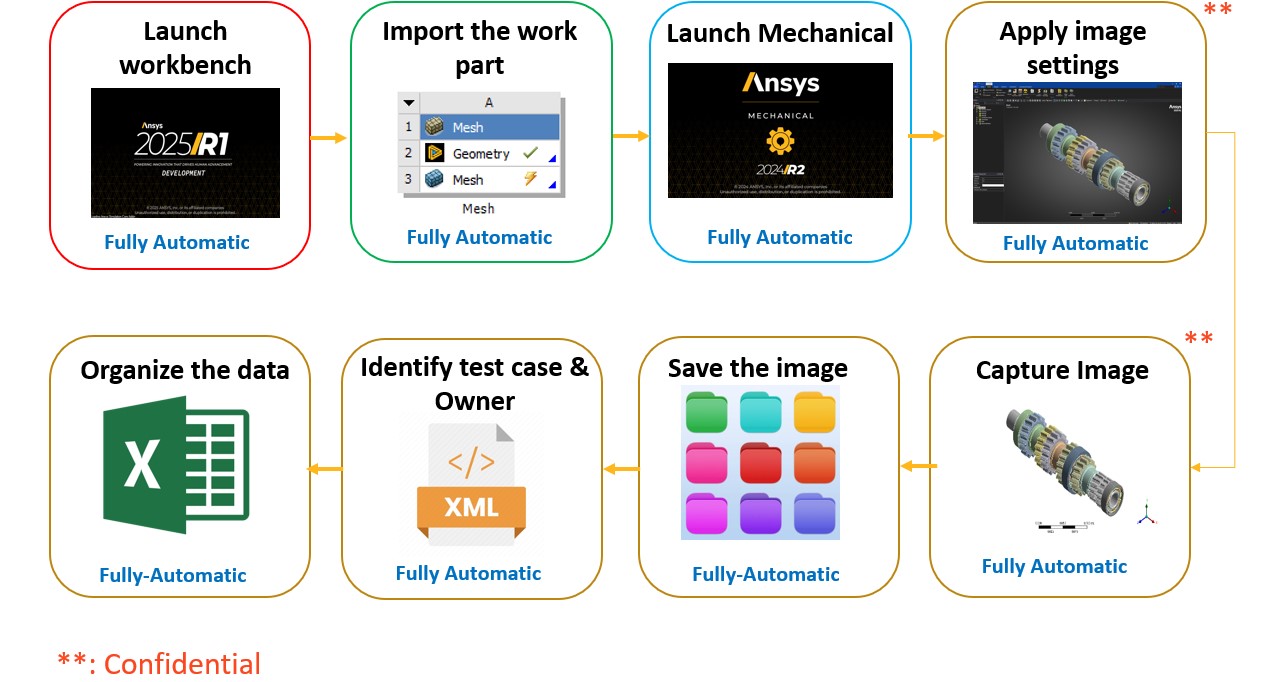
- Automated CAD pre-processing for PCB components in and optimized mesh generation using the Stacker Mesh Workflow in Ansys, reducing mesh generation time by for clients like Apple and Nvidia.
- Developed a Python automation script using Ansys APIs to process and capture images for 2500+ workbench projects and 6,500+ geometry parts.
- Performed interactive & batch regression testing with Ansys Regression Test Manager (ARM) to ensure code integrity, utilizing Git and Azure DevOps for version control, issue tracking, and collaborative code deployment.
- Tools: Python, Git, Linux, Numpy, Pandas, Azure DevOps, Ansys Workbench, Ansys Mechanical, Ansys Discivery, ARM


- Improved pose accuracy by 23% of a Cable-Driven Parallel Robot by incorporating the extended kinematics in forward kinematics model; Optimized trajectory with 5th-order polynomial to suppress oscillations and improve stability.
- Designed a parabolic unfurlable antenna for spacecraft featuring an impressive deployed-to-stowed ratio of 8.
- Developed Attitude and Orbit Control System for a tethered Smart Space Robot, achieving 95% stabilizing accuracy by integrating Kalman Filter for state estimation and PID control for precise thruster-based maneuveres in microgravity.
- Conducted 200+ hours of real-time and system integration testing of INsat Performance Analysis Software (INPAS) for the CH-3 (Lunar Lander), Gaganyaan (Human Space Flight), and NVS-01 (Navigation) missions.
- Developed and optimized algorithms for 8 spacecraft missions, including the NASA-ISRO SAR satellite, leading to 30% faster simulation of in-flight propulsion conditions by resolving 50+ software bugs in the INPAS software.
- Performed risk analysis and developed contingency plans for potential propulsion failures, executing 10+ orbit correction maneuvers and ensuring a 100% mission success rate for the CH-3 (Indian Lunar Lander) mission.

- Led the design and thermo-structural FEA of 60+ electromechanical components, including PCBs, MEMS devices, sensors, and latch valves using ANSYS, ensuring structural integrity and thermal reliability under launch conditions.
- Performed thermo-structural analysis on a 100N H2O2 Green Propulsion Thruster, optimizing thermal distribution and reducing peak stresses by 30%, ensuring structural integrity under operating temperatures up to 1000°C.
- Performed static and dynamic FEA (stress, modal, and vibration) for CH-3 (Lunar Lander), Gaganyaan (Human Space Flight), and NASA-ISRO SAR missions, reducing structural failure risk by 50% and ensuring 99% mission reliability.
- Led FEA of transducer, achieving durability of 500,000 load cycles; ensuring structural integrity for flight conditions.
- Achieved 35% propellant tank weight reduction for the Smart Space Robot through iterative design optimization, and advanced material selection (Ti-6Al-4V); delivered and integrated the system within a record 4 months.
- Performed vibration testing on the largest satellite-class tank (1417L capacity, 2.1m diameter), validating structural integrity under lateral & longitudinal vibration loads up to 13.5g for spaceflight conditions.
- Optimized passive-control device design, increasing propellant tank slosh damping by 25% and enhancing spacecraft stability during dynamic maneuvers.
- Designed and developed a 40L positive expulsion propellant tank for micro-gravity conditions, ensuring 100% fuel delivery reliability through iterative testing and material optimization.
- Tools: Ansys, Hypermesh, Nastran/Patran, AutoCAD, NX, SolidWorks, Python, MATLAB
Projects
Advanced Multi-Object Tracking with Kalman Filter and Neural Features
- Skills: Kalman filtering, Probabilistic Data Association, Deep Learning, Multi-Object Tracking, and Performance Optimization
- Developed an advanced Kalman filter system with probabilistic data association for robust multi-object tracking.
- Outperformed traditional bounding-box-only tracking methods in accuracy and reliability.
- Enhanced the algorithm by integrating deep neural features, achieving performance comparable to StrongSORT.

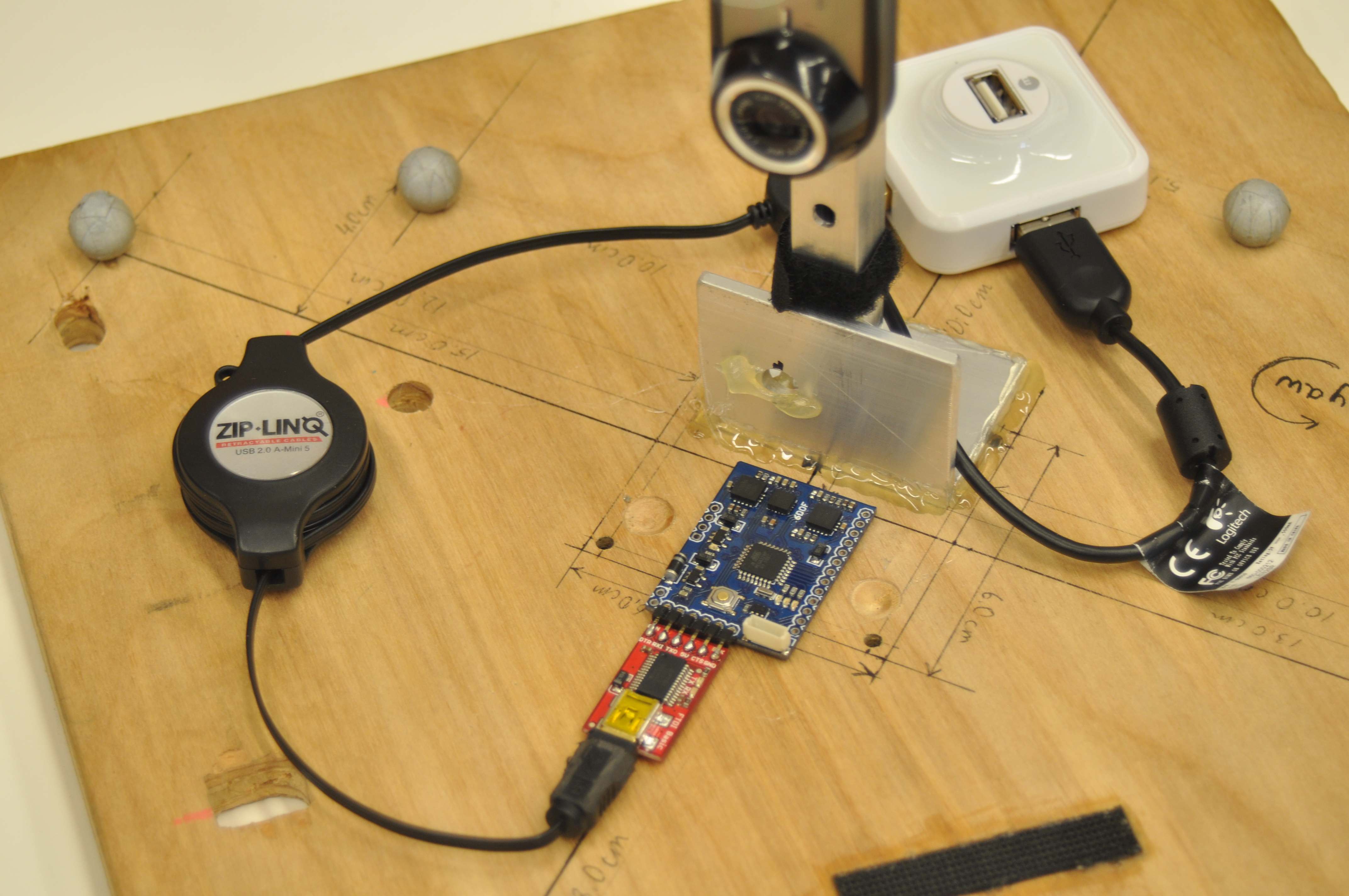
Phone Detection Pipeline using Deep Learning (Object Detection)
- Skills: Computer Vision, Deep Learning, Machine Learning, PyTorch, OpenCV, RCNN, Git, Version-Control
- Developed a PyTorch and OpenCV-based phone detection pipeline, achieving >85% accuracy on a labeled dataset using a customized CNN model.
- Preprocessed the data by image resizing to 64x64 pixels, normalization to [0, 1] range, and 75:25 train-test split.
- Performed mini-batch training for 50 epochs with batch size of 8, using Adam optimizer and Mean Squared Error loss function.
- CNN architecture involved with 3 connected layers followed by ReLU activation, batch normalization, max pooling, dropout rate of 0.3 and 3 fully connected layers.
- Achieved >80% detection accuracy on the test dataset by engineering a custom dataset class for efficient data management, including image resizing, and normalization for precise phone localization
YouBot's control for pick-and-place tasks using trajectory planning, feedback control, and CoppeliaSim simulation
- Skills: MATLAB, CoppeliaSim, Robotics programming, Trajectory Planning, Control System (PID) Tuning, Simulation, and Motion Analysis
- Developed control software for youBot, integrating a Kinematics Simulator, Reference Trajectory Generator, and Feedforward-Feedback Controller.
- Enabled mobile manipulation capabilities, allowing the robot to navigate, pick up objects, and place them precisely at target locations.
- Designed and fine-tuned control systems to ensure smooth and accurate robot movements.
- Demonstrated the functionality in CoppeliaSim, simulating real-world tasks like object handling and placement.
- Showcased the system’s performance through tasks involving optimized trajectory planning and feedback control.
Performance Evaluation of Trajectory Tracking Algorithms for Mobile Robots
- Skills: Model Predictive Control (MPC), Global Policy Iteration (GPI), Non-linear Control, Python, CasADi
- Formulated Markov Decision Process; defined Value function, State Space, Control Space, Dynamic and Kinematic constraints
- Evaluated tracking performance of RHCEC (Receding Horizon Certainty Equivalent Control) and GPI (Global Policy Iteration)
- CEC: Transformed stochastic OC to deterministic Finite Horizon OC, solved as Non-Linear Program using CasADi solver
- GPI: Approximated continuous-time system as discrete-time system, used Value Iteration algorithm for optimal control policy
- Developed a multi-threaded 3-tier Skills-Tactics-Plays architecture for controlling omni-directional robots using ROS
- Results showed CEC is Robust in real-time while GPI is offline and slower, less noise-sensitive, and discretization dependent

Benchmarking Sampling-based and Search-based Motion Planning algorithms in 3D environments
- Skills: 3D Motion Planning, A*, RRT*, Heuristic Function, 3D Graph-search, Data Structures and Algorithms, Python
- Implemented a collision-checking mechanism for a robot’s safe navigation in 3D maze-like environments towards the goal
- Implemented and assessed weighted-A* and RRT, RRT* algorithms for the robot’s goal-reaching performance
- RRT achieved 30% faster and more memory-efficient performance, while A* showed superior path quality with shorter path
- Provided insights into expanded nodes, sampling method heuristic selection (Euclidean, Manhattan distance), aiding algorithm selection based on complexity, efficiency trade-offs, and graph creation efficiency in the sampling-based approach
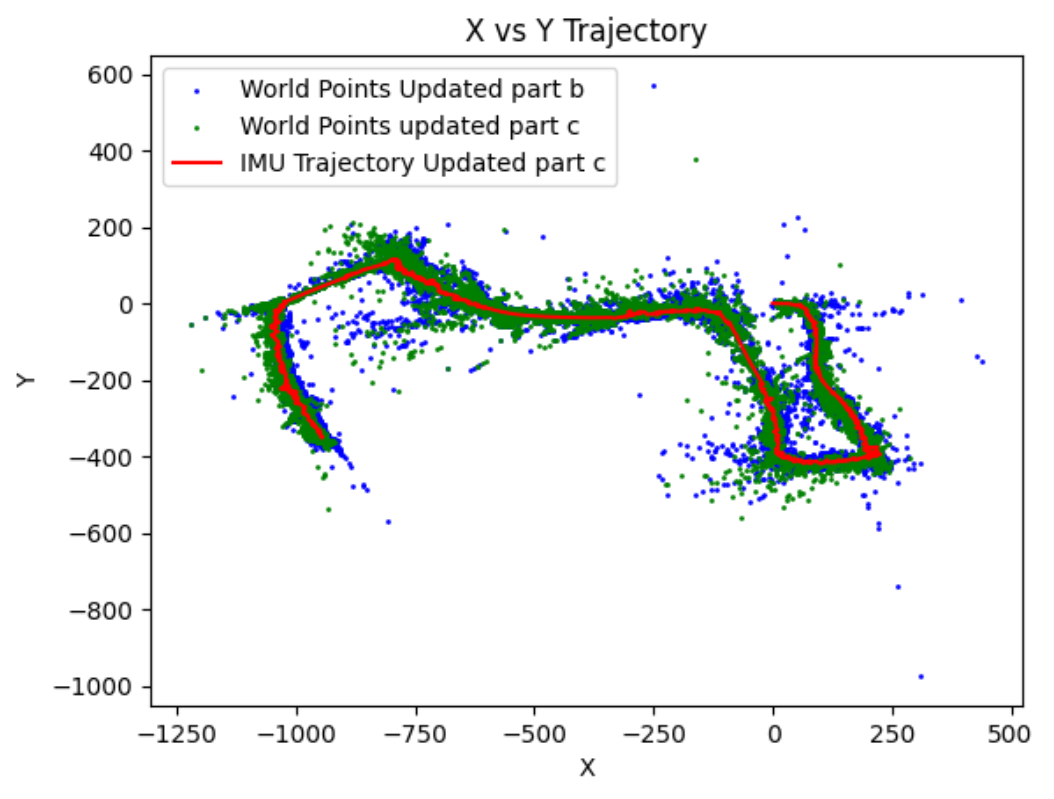
Visual Inertial SLAM using Extended Kalman Filter (EKF)
- Skills: VSLAM, Kalman Filter, Sensor Fusion, IMU and Camera Calibration, SE(3) Kinematics, Map Accuracy, OpenCV
- Conducted sensor fusion for data synchronization between IMU and stereo camera, implementing EKF for real-time positioning and orientation updates of autonomous car pose using SE(3) kinematics and landmark locations
- Analyzed motion and observation model noise sensitivities, achieving 95% environment mapping accuracy through simultaneous car pose and landmark correction using observation model Jacobians
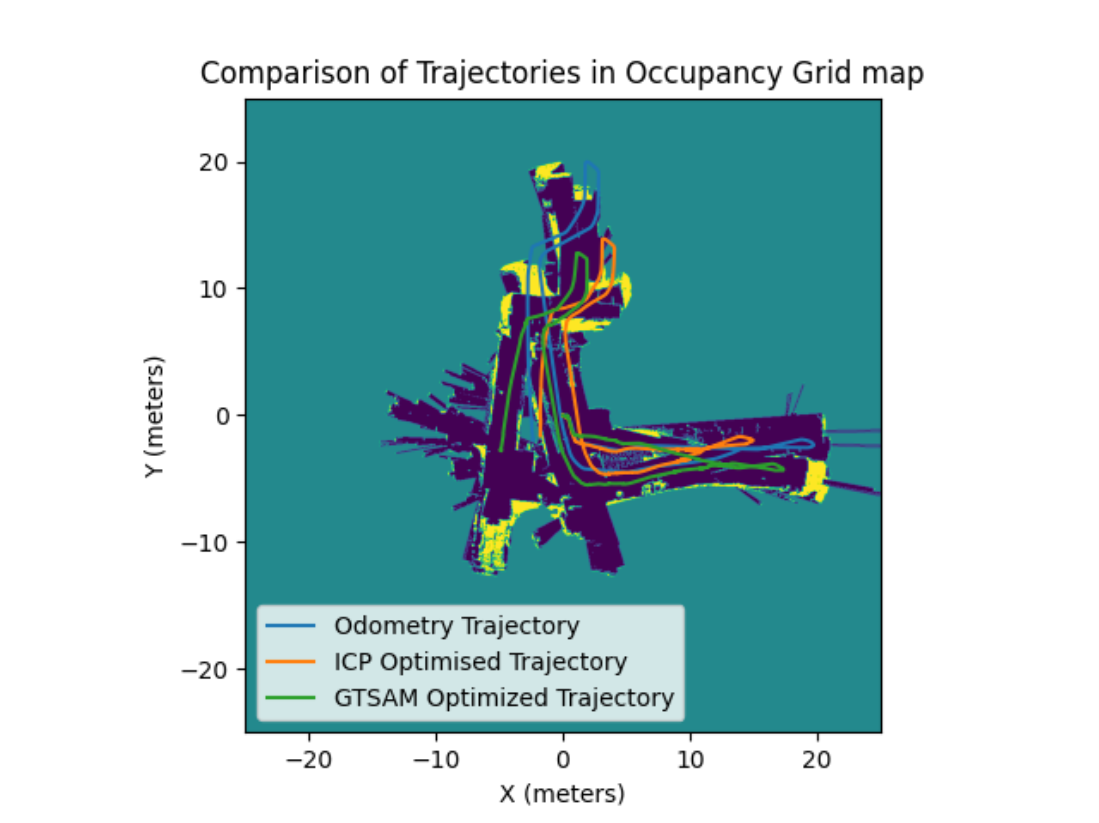
Sensor Fusion, ICP Scan Matching, and GTSAM-Driven Pose Graph Optimization
- Skills: Python, sensor fusion, SLAM algorithms (ICP, odometry, loop closure), optimization with GTSAM, 2D Occupancy-grid Map, and Texture Map
- Sensor Fusion: The SLAM system integrates data from encoders, an IMU, a Hokuyo LiDAR, and a Kinect RGBD camera to achieve robust environment mapping and navigation. Odometry Estimation: Encoder and IMU odometry is computed as the foundational step, providing initial estimates for the robot's trajectory. ICP-Based LiDAR Scan Matching: The Iterative Closest Point (ICP) algorithm is used for aligning successive LiDAR scans, refining the robot's pose estimates during navigation. Pose Graph Optimization: The Georgia Tech Smoothing and Mapping (GTSAM) library is employed to optimize the robot's trajectory using factor graphs, incorporating loop closure constraints to improve accuracy. Occupancy and Texture Mapping: The project includes the generation of detailed occupancy and texture maps, highlighting the integration of RGBD measurements with 2D LiDAR data for enhanced environmental representation.
Autonomous Navigation in a Door & Key environment
- Skills: Python, gymnasium, minigrid
- Dynamic Programming: Utilizes the Dynamic Programming approach to solve motion planning problems in an environment with doors and keys
- Markov Decision Process (MDP): Models the environment as an MDP, including state space, control space, state transitions, and associated costs
- Value Iteration Algorithm: Implements the Value Iteration algorithm to compute an optimal policy for navigation
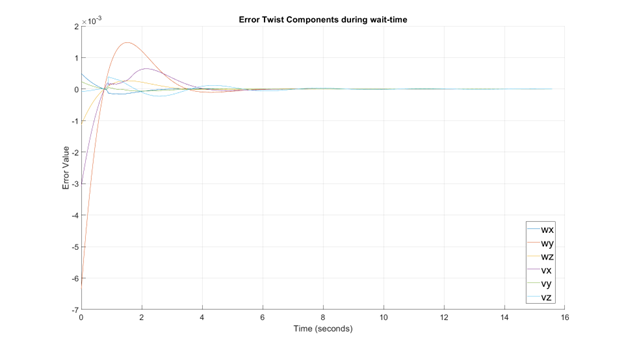
Quaternion Trajectory Tracking of Rotating body using IMU measurements
- Skills: Machine Learning, Trajectory Optimization, IMU Calibration, Sensor Fusion, JAX, JAXNumpy, transforms3D, Panorama
- Conducted IMU calibration, including raw ADC values conversion and bias correction, ensuring accurate sensor measurements
- Implemented Machine Learning model with Projected Gradient Descent, optimizing quaternion trajectory using IMU data
- Constructed a Panoramic image by stitching the RGB camera images over time based on the optimized quaternion trajectory
Skills
Languages and Softwares
 C++11
C++11
 MATLAB
MATLAB
 Simulink
Simulink
 ROS
ROS
 Gazebo
Gazebo
 RViz
RViz
 SolidWorks
Ansys
SolidWorks
Ansys
Python Libraries
 SciPy
SciPy
 OpenGL
OpenGL
 Gym
Gym
 CasADi
CasADi
C++ Libraries
 Eigen
Eigen
 PCL
PCL
 OMPL
OMPL
Other
 Git
Git
 Arduino
Arduino
Operating Systems
 Linux
Linux
 Windows
Windows
Education
University of California San Diego
San Diego, United States
Degree: M.S. in Robotics (Mechanical Engineering)
Department of Mechanical and Aerospace Engineering
GPA: 3.79/4.0
- Planning & Learning in Robotics
- Sensing & Estimation in Robotics (SLAM)
- Robot Manipulation and Control
- Machine Learning for Physical Applications
- Safety in Autonomous Systems
- Soft Robotics
- Probability and Statistics
- Linear Systems Theory
- Python Programming for Data Analysis
Relevant Courseworks:
Indian Institute of Space Science and Technology
Trivandrum, India
Degree: B.Tech in Aerospace Engineering
CGPA: 8.96/10
- Introduction to Robotics
- Systems and Controls
- Machine Design
- Manufacturing and Autonomous Systems
- Linear Algebra
- Numerical Analysis
- Rocket Propulsion
- Space Flight Mechanics
Relevant Courseworks: